
“Robot” kavramı kısaca kendi kendine yetebilen (otonom) ve programlanabilen, canlılara benzer işlevleri yapabilen makine anlamına gelmektedir. “Endüstriyel robotlar” ise, daha çok endüstriyel uygulamalarda kullanılan, sabit veya hareketli olabilen, birden çok ekseni olan olan, otonom manipülatörden oluşmaktadır. Bu robotlar yüksek dayanıma, hıza ve hassasiyete sahiptir. Üretim alanındaki kaynak, boyama, montaj vb. işlerde bize yardımcı olmaktadır.
1. Nesil Endüstriyel Robotlar
- 1940 yılında Grey Walker, ışığa göre hareket eden robotları üretti. (İlk gezer robotlar)
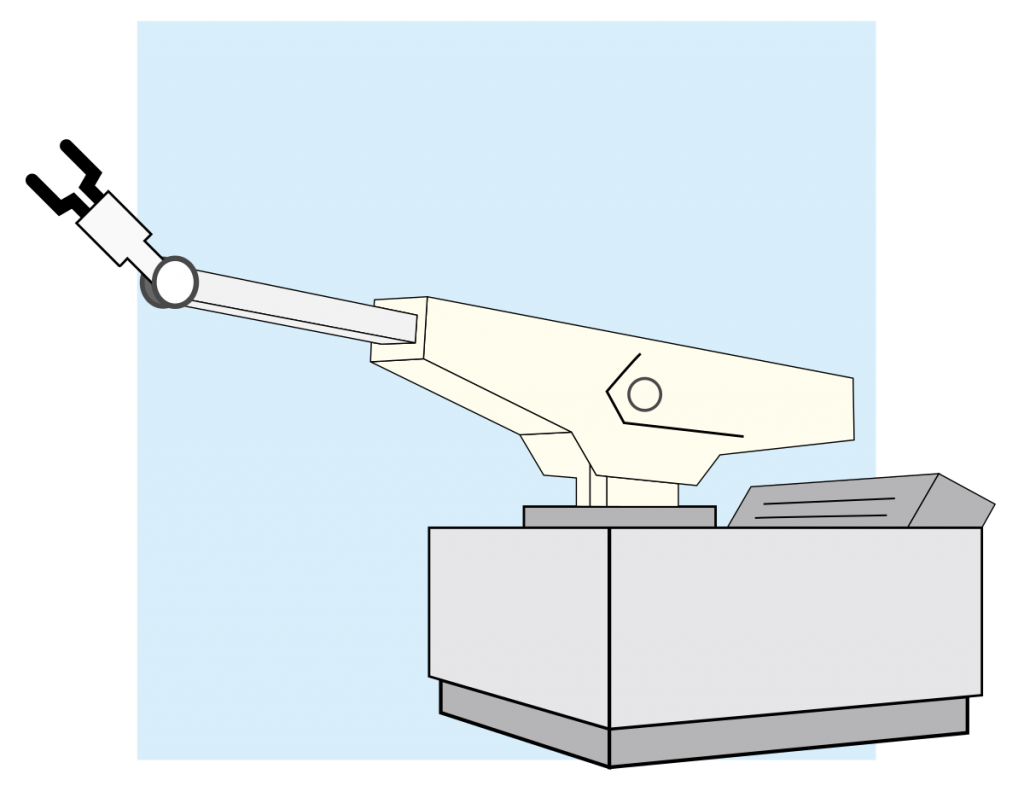
- 1951 yılında Raymond Goertz, uzaktan kontrol edilebilen bir robot kol tasarladı.
- 1954’te ise George Devol, programlanabilen genel amaçlı bir bir robot tasarladı ve patent başvurusunu yaptı.
- Dünyadaki ilk robot firmasını da George Devol ve Joseph F. Engelberger 1956 yılında kurdu. (Unimation Inc.)
- 1958’e geldiğimizde ise satış amaçlı ilk ticari robot üretilmişti.
- 1960 yılında Harry Johnson ve Veljko Milenkovic tarafından tasarlanan “Versatran” isimli robot satılmaya başladı. Unimation robotlarının adı da “Unimate Robot Sistemleri” oldu.
- Generals Motors şirketi, 1962 yılında ilk kez bir endüstriyel robotu (sağda görseli bulunan Unimate) üretim hattında kullanmaya başladı. Bu robotun görevi, sıcak parçaları kalıp döküm makinesinden alarak belirlenen yerde depolamaktı.
- 1963 yılında ise bilgisayar denetimli, altı eklemli ilk yapay kol hayatımıza girdi. (Rancho arm)
2. Nesil Endüstriyel Robotlar
- Bu aşamada üretilen robotlarda noktadan noktaya hareketi ve sürekli rotaların takibini sağlayan servo motorları kullandık. Kontrol sistemi olarak da mikroişlemci veya PLC ön plana çıktı. Bu sayede robotlar, bir öğretme kutusunu kullanabilen operatör tarafından programlanabildi. Bu robotlar daha karmaşık işler yapmalarına rağmen yine de esnek bir yapıları yoktu. Her robotun yaptığı işe özel bir programı vardı.
- 1969 yılında Standford Üniversitesi’nde çalışan Victor Scheinman, elektrik ile çalışan “Standford Kolu”nu tasarladı.
- Ayrıca 1973 yılında da küçük ve hafif bir robot (Vicarm) dizayn etti. Bu küçük robot, montaj işlerinde oldukça kullanışlıydı. “Vicarm”, daha sonra ünlü “PUMA (Programmable Universal Machine for Assebly)” robotu için sağlam bir temel oldu.
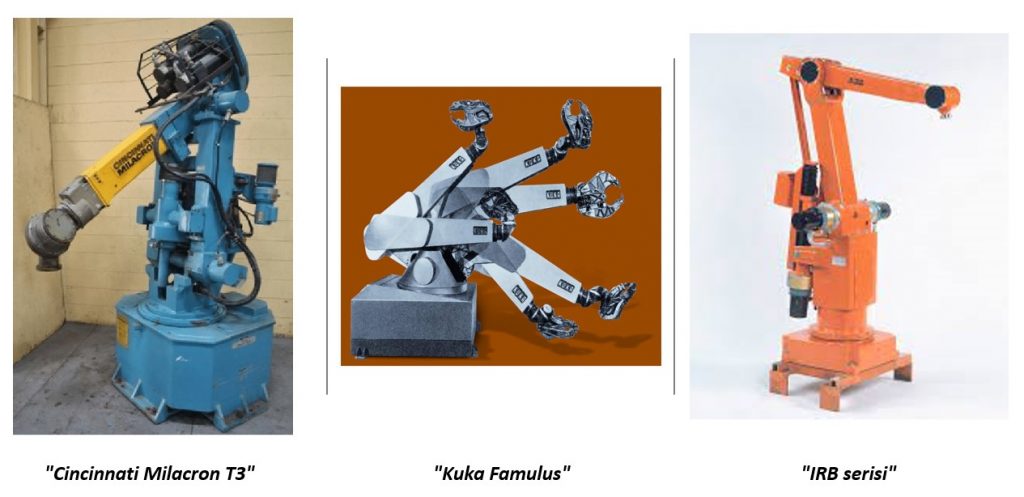
- 1970’lere geldiğimizde ise sektör gelişmişti. ABB’nin ünlü “IRB serisi”, “Kuka Famulus”, “Cincinnati Milacron T3”, “Hitachi HI-T-HAND Expert” gibi robotların hepsi bu gelişme döneminde piyasaya girdi.
3. Nesil Endüstriyel Robotlar
- Daha kapsamlı çevre etkileşimi olan, ses veya görme gibi kompleks birimleri kullanabilen robotlar bu aşamada üretime girdi.
- Bu robotlar da servo motorlar ile yardımı ile hareket ediyordu. Hem çevrimiçi hem de çevrimdışı, PLC ya da PC’ye bağlı olarak programlanabilen robotlar için yüksek seviyede programlama bilmek önemli hale geldi.
- Ayrıca bu gelişen özellikler sayesinde proseslerdeki ani değişikliklere uyum sağlamak kolaylaştı.
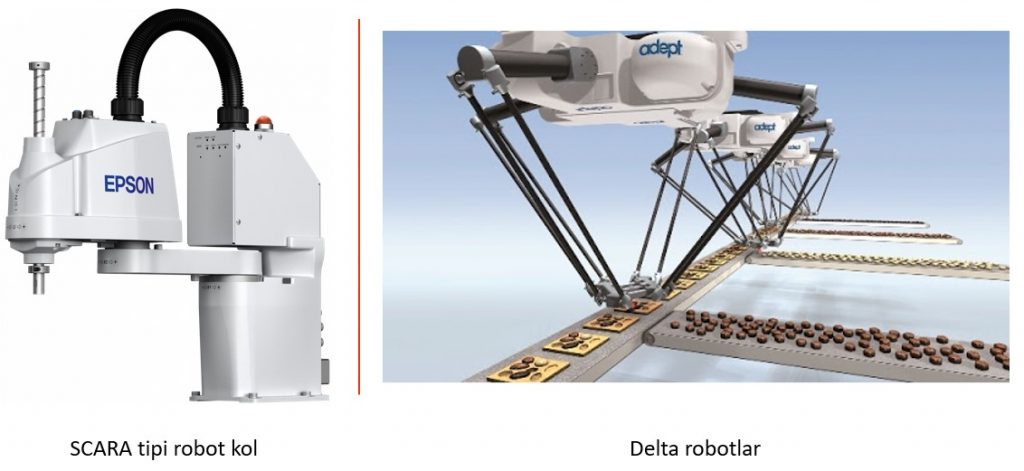
- “SCARA (Selective Compliance Assembly Robot Arm)” tipi robot kollar da bu dönemde yaygınlaştı. Bu robot kollar özellikle küçük parçaların montajı ve taşınması için avantaj sağladı.
- Bu gelişmelerin sonucunda yüksek hızlarda ve küçük alanlarda görev yapma ihtiyacı oluştu. Bunun için de yeni kinematik yapılar oluştu ve “Delta robotlar” ortaya çıktı.
4. Nesil Endüstriyel Robotlar
- 2000 yılından günümüze kadar gelişmeye devam eden robotlar, 4. nesil olarak adlandırılmaktadır.
- Kompleks hesaplamalar ve mantıksal değerlendirmeler yapabilen endüstriyel robotlar, derin öğrenme ve yapay zeka gibi yeni teknolojileri de kullanmaya başladı. En önemlisi de insanlar ile etkileşim düzeyleri oldukça yükseldi.
- Günümüzde popüler hale gelen robot süpürgeler de aslında ilk olarak 2002 yılında üretildi. (iRobot- Roomba)
- 2005 yılında ise Cornell Üniversitesi’nde, eklenip çıkarılabilen modüler parçalardan oluşan bir robot tasarlandı. Ayrıca bu robot, kendi kendini kopyalayabilen ilk robot oldu.
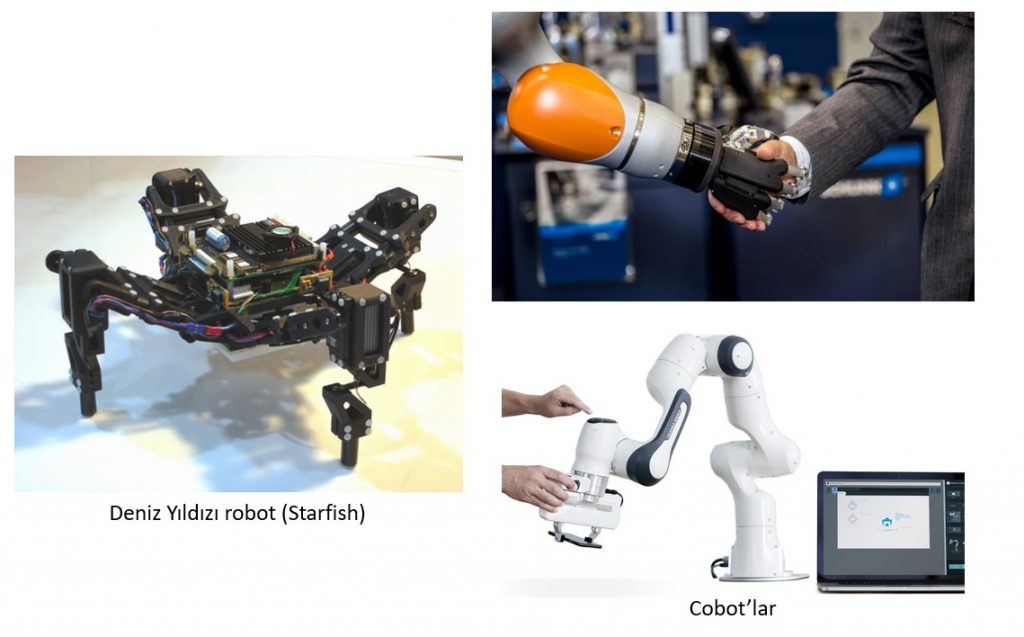
- Universal Robots bir lansman yaptı ve “cobot” olarak bilinen yani “collaborative (işbirliksel robotlar)”ların öncüsü oldu.
- 2006 yılında, yine Cornell Üniversitesi “Deniz Yıldızı” robotunu üretti. Bu robot kendini tekrar tekrar modelleyebiliyor ve yürümeyi öğrenebiliyordu.
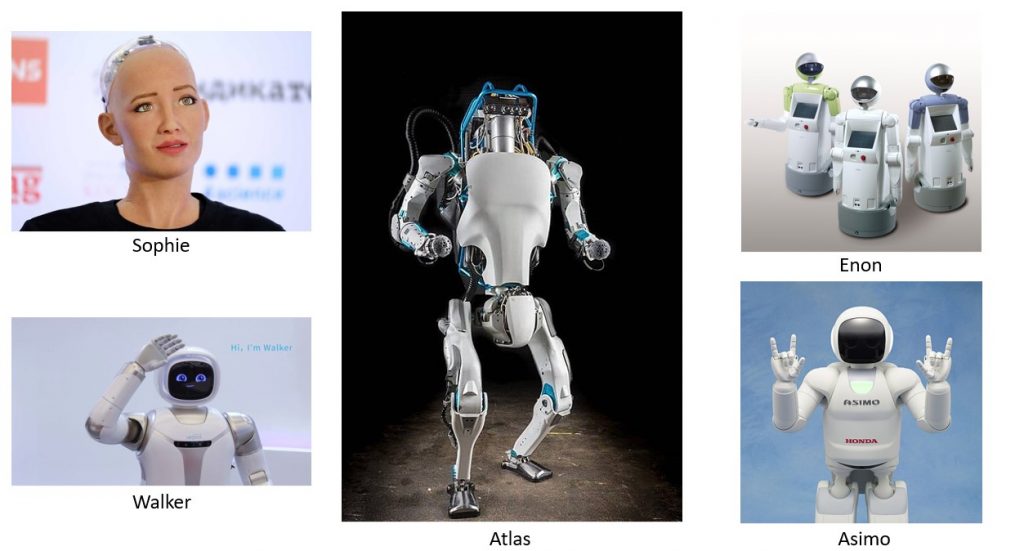
- Tüm bunların yanı sıra ortaya çıkan insansı robotlar da oldukça ilgi konusu haline geldi. (Enon, Walker, Sophia, Asimo, Atlas vb.)
- Otonom araçlar, otonom drone ve otonom robot gibi yeni teknolojilerle de sektör, hala gelişmeye devam etmektedir.
Mühendislik kategorimizde yer alan diğer içeriklerimizi okumanızı da tavsiye ederiz.
Yorumları Göster


